Следование по линии - руководство по использованию датчиков
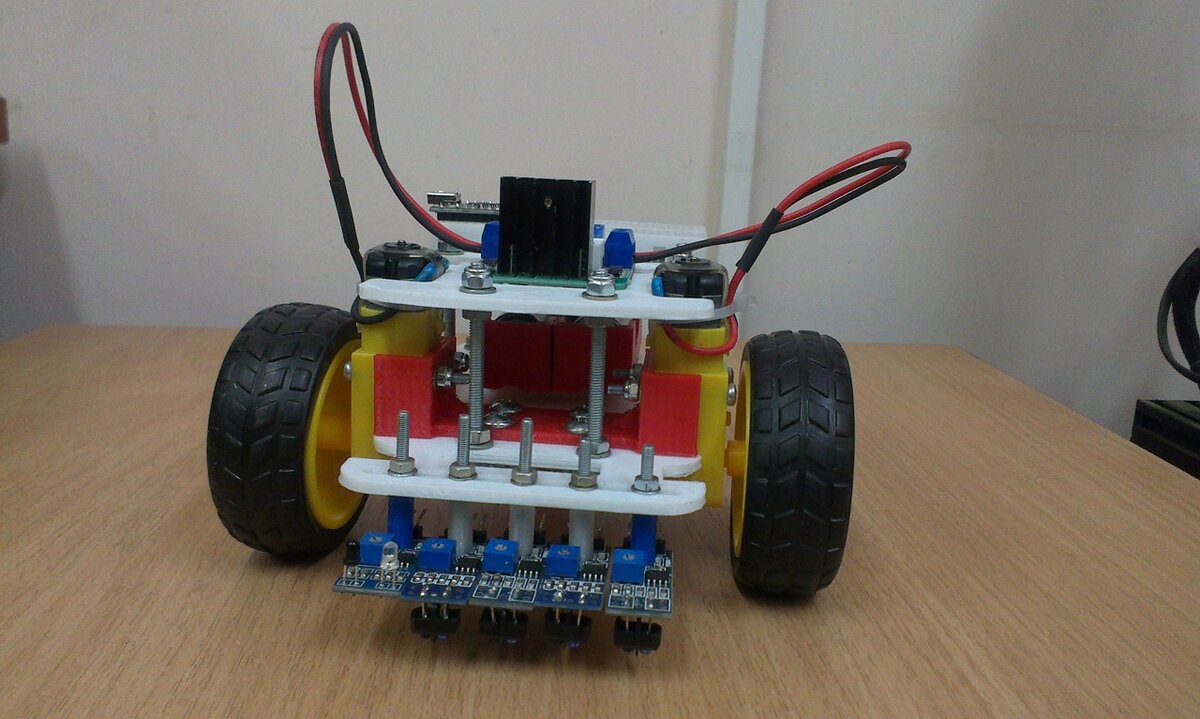
В данной статье будет описан процесс создания робота, ездящего по линии. Эта задача является классической, идейно простая, она может решаться много раз, и каждый раз вы будете открывать для себя что-то новое. Решение этой задачи и реализация полученного решения позволяют приобрести необходимые начальные навыки для дальнейшего совершенствования в робототехнике. Существует множество подходов для решения задачи следования по линии. Выбор одного из них зависит от конкретной конструкции робота, от количества сенсоров, их расположения относительно колёс и друг друга.









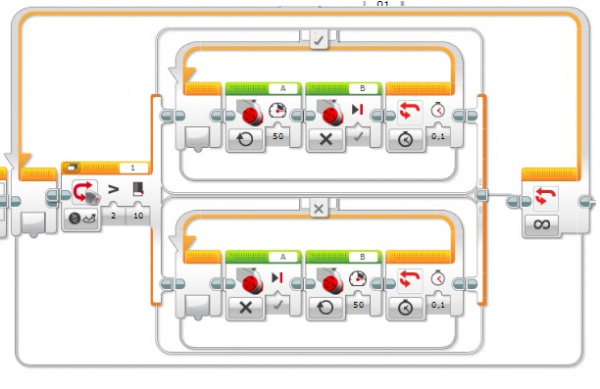
Общая информация Первые шаги. Свойства проекта. Подключение к EV3. Страница аппаратных средств.







Содержание урока. Палитры программирования и программные блоки. Зеленая палитра — блоки действия. Прямолинейное движение, повороты, разворот на месте остановка. Экран, звук, индикатор состояния модуля. На втором занятии мы детальнее познакомимся со средой программирования и подробно изучим команды, задающие движение нашему роботу-тележке, собранному на первом занятии.